Основни прекидач са кратком шарком

-

Висока прецизност
-

Побољшани живот
-

Широко коришћено
Опис производа
Прекидач са шарнирном полугом нуди проширени домет и флексибилност при активирању. Дизајн полуге омогућава лако активирање и савршен је за примене где ограничења простора или незгодни углови отежавају директно активирање. Најчешће се користи у кућним апаратима и индустријским контролама.
Димензије и радне карактеристике
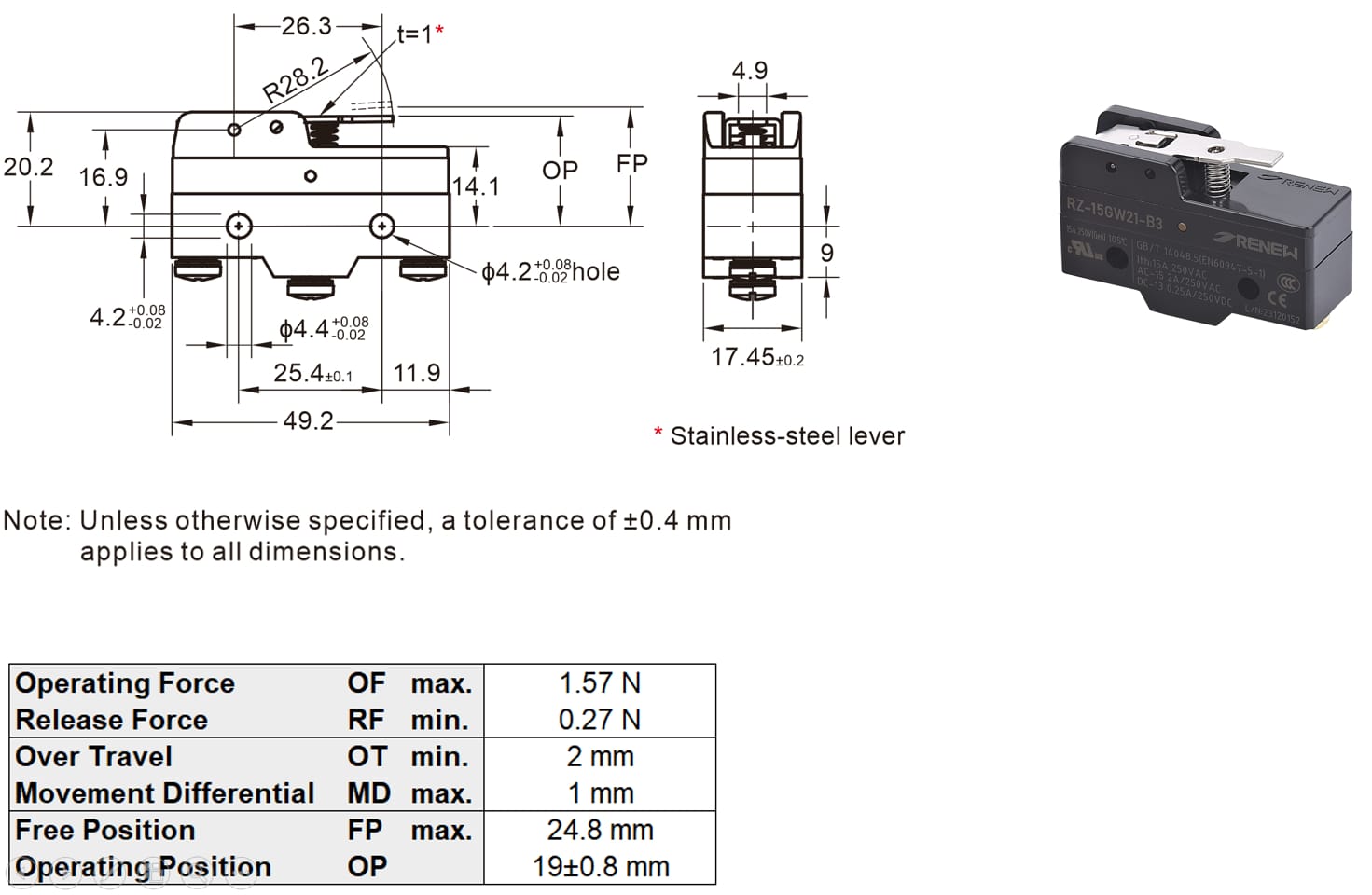
Општи технички подаци
| Оцена | 15 A, 250 VAC |
| Отпорност изолације | 100 MΩ мин. (на 500 VDC) |
| Отпорност контакта | 15 mΩ макс. (почетна вредност) |
| Диелектрична чврстоћа | Између контаката истог поларитета Контактни зазор G: 1.000 VAC, 50/60 Hz током 1 мин Контактни размак H: 600 VAC, 50/60 Hz током 1 мин Контактни зазор E: 1.500 VAC, 50/60 Hz током 1 мин |
| Између металних делова који проводе струју и уземљења, и између сваког терминала и металних делова који не проводе струју 2.000 VAC, 50/60 Hz током 1 мин | |
| Отпорност на вибрације у случају квара | 10 до 55 Hz, двострука амплитуда 1,5 mm (квар: макс. 1 ms) |
| Механички век трајања | Контактни зазор G, H: мин. 10.000.000 операција. Контактни размак E: 300.000 операција |
| Електрични век трајања | Контактни зазор G, H: мин. 500.000 операција. Контактни зазор E: мин. 100.000 операција. |
| Степен заштите | Општа намена: IP00 Отпорно на капање: еквивалентно IP62 стандарду (осим терминала) |
Примена
Основни прекидачи компаније Renew играју кључну улогу у обезбеђивању безбедности, прецизности и поузданости различитих уређаја у различитим областима. Ево неких популарних или потенцијалних примена.

Сензори и уређаји за праћење
Често се користи у индустријским сензорима и уређајима за праћење за контролу притиска и протока служећи као механизам са брзим дејством унутар уређаја.

Индустријске машине
Користи се у машинским алаткама за ограничавање максималног кретања опреме и за детекцију положаја радних предмета, обезбеђујући прецизно позиционирање и безбедан рад током обраде.
Зглобне роботске руке и хватаљке
Интегрисано у зглобне роботске руке за употребу у контролним склоповима и обезбеђује вођење на крају хода и у облику мреже. Интегрисано у хватаљке зглоба роботске руке за детекцију притиска хватања.













