Прекидач за граничник колебања завојнице са пластичним врхом

-

Робусно кућиште
-

Поуздана акција
-

Побољшани живот
Опис производа
Минијатурни гранични прекидачи серије RL8 компаније Renew нуде побољшану издржљивост и отпорност на тешке услове окружења, са механичким веком трајања до 10 милиона операција. Ово их чини идеалним за критичне и тешке примене где стандардни основни прекидачи не би били довољни. Са флексибилном опружном шипком, гранични прекидачи са осцилацијом завојнице могу се користити у више праваца (осим аксијалних праваца), прилагођавајући се неусклађености. Савршено су погодни за детекцију објеката који се приближавају из различитих углова. Доступни су пластични и жичани врх за различите примене.
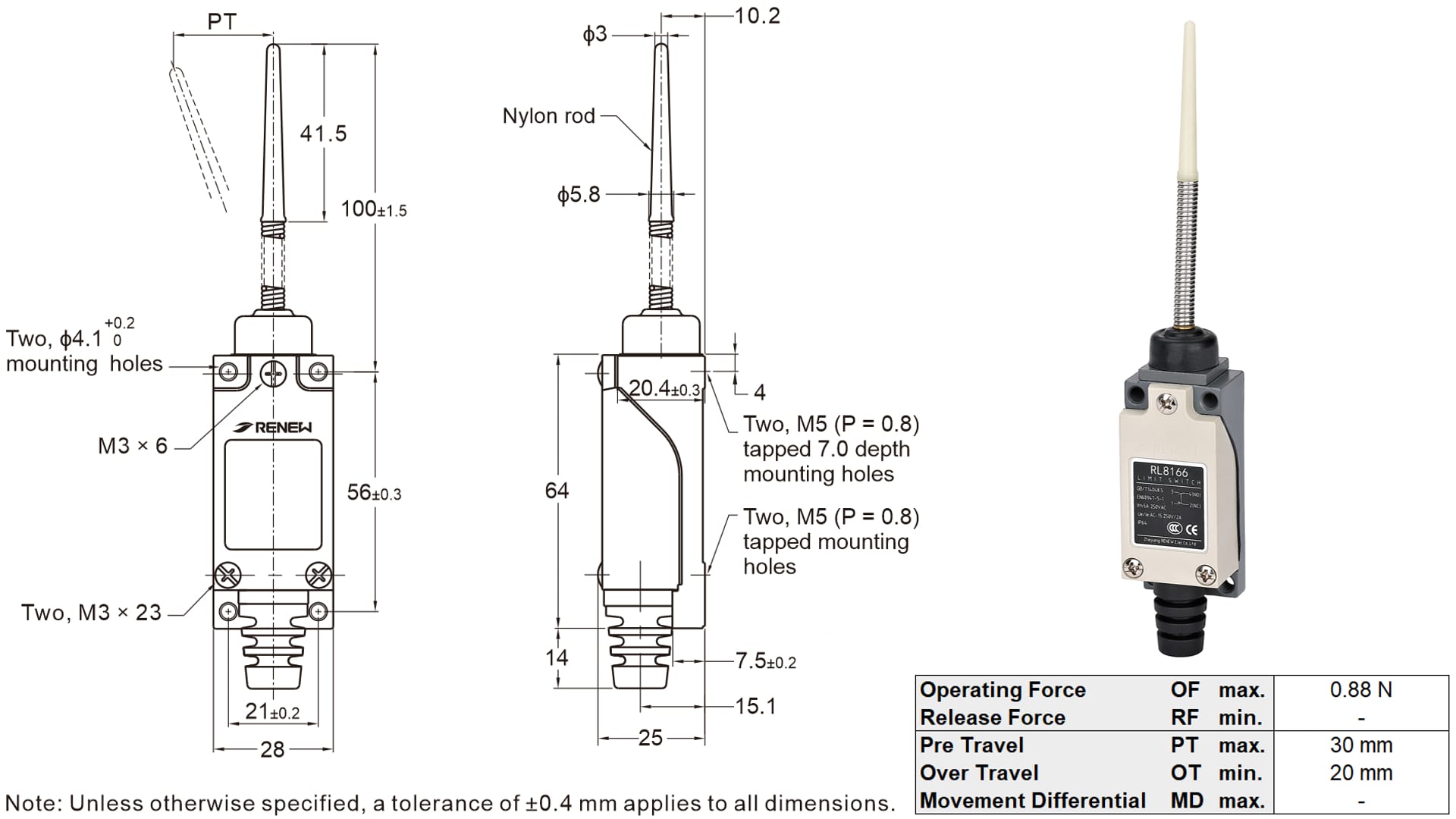
Димензије и радне карактеристике
Општи технички подаци
| Амперна номинална вредност | 5 A, 250 VAC |
| Отпорност изолације | 100 MΩ мин. (на 500 VDC) |
| Отпорност контакта | 25 mΩ макс. (почетна вредност) |
| Диелектрична чврстоћа | Између контаката истог поларитета 1.000 VAC, 50/60 Hz током 1 мин |
| Између металних делова који проводе струју и уземљења, и између сваког терминала и металних делова који не проводе струју 2.000 VAC, 50/60 Hz током 1 мин | |
| Отпорност на вибрације у случају квара | 10 до 55 Hz, двострука амплитуда 1,5 mm (квар: макс. 1 ms) |
| Механички век трајања | 10.000.000 операција мин. (120 операција/мин) |
| Електрични век трајања | 300.000 операција мин. (под номиналним отпорним оптерећењем) |
| Степен заштите | Општа намена: IP64 |
Примена
Минијатурни гранични прекидачи компаније Renew играју кључну улогу у обезбеђивању безбедности, прецизности и поузданости различитих уређаја у различитим областима. Ево неких популарних или потенцијалних примена.

Складишна логистика и процеси
У модерним складиштима и фабрикама, ови гранични прекидачи могу се користити у машинама за паковање за детекцију неправилно обликованих паковања која се крећу по транспортеру. Флексибилна шипка се савија према облику паковања, активирајући прекидач. Такође се могу користити у роботици и аутоматизованим системима за детекцију крајњих положаја роботских руку или покретних делова који се можда неће савршено поравнати сваки пут.













